Впихнуть невпихуемое…
Итак, начинаем новый проект!
Будем строить радиоуправляемую модель грузовика ГАЗ-53А в масштабе 1/43 путем доработки соответствующей модели журнальной серии Deagostini.
Что планирую реализовать:
— движение вперед и назад (пропорциональное управление);
— повороты вправо и влево (пропорциональное управление);
— работу фар ближнего/дальнего света и задних фонарей;
— работу указателей поворота и стоп-сигналов;
— управление по WiFi со смартфона (в перспективе с пульта);
— передняя подвеска — балка на работающих рессорах;
— задний мост с редуктором на конических шестернях с работающими рессорами;
— привод от электродвигателя с редуктором через карданную передачу;
— фигурка водителя в кабине.
Кроме того, постараюсь максимально сохранить копийность модели и узлов, хотя это и не всегда возможно в силу формы и размеров применяемых электронных и механических компонентов.

Про саму модель много писать не буду — это типичный представитель журнальной серии «Автолегенды СССР» изготовленный китайскими товарищами со всеми вытекающими недостатками:
— прототипу соответствует слабо;
— детализация низкая, особенно снизу;
— кривая сборка с подтеками супер-клея;
— отломанные, при транспортировке до киоска, детали .
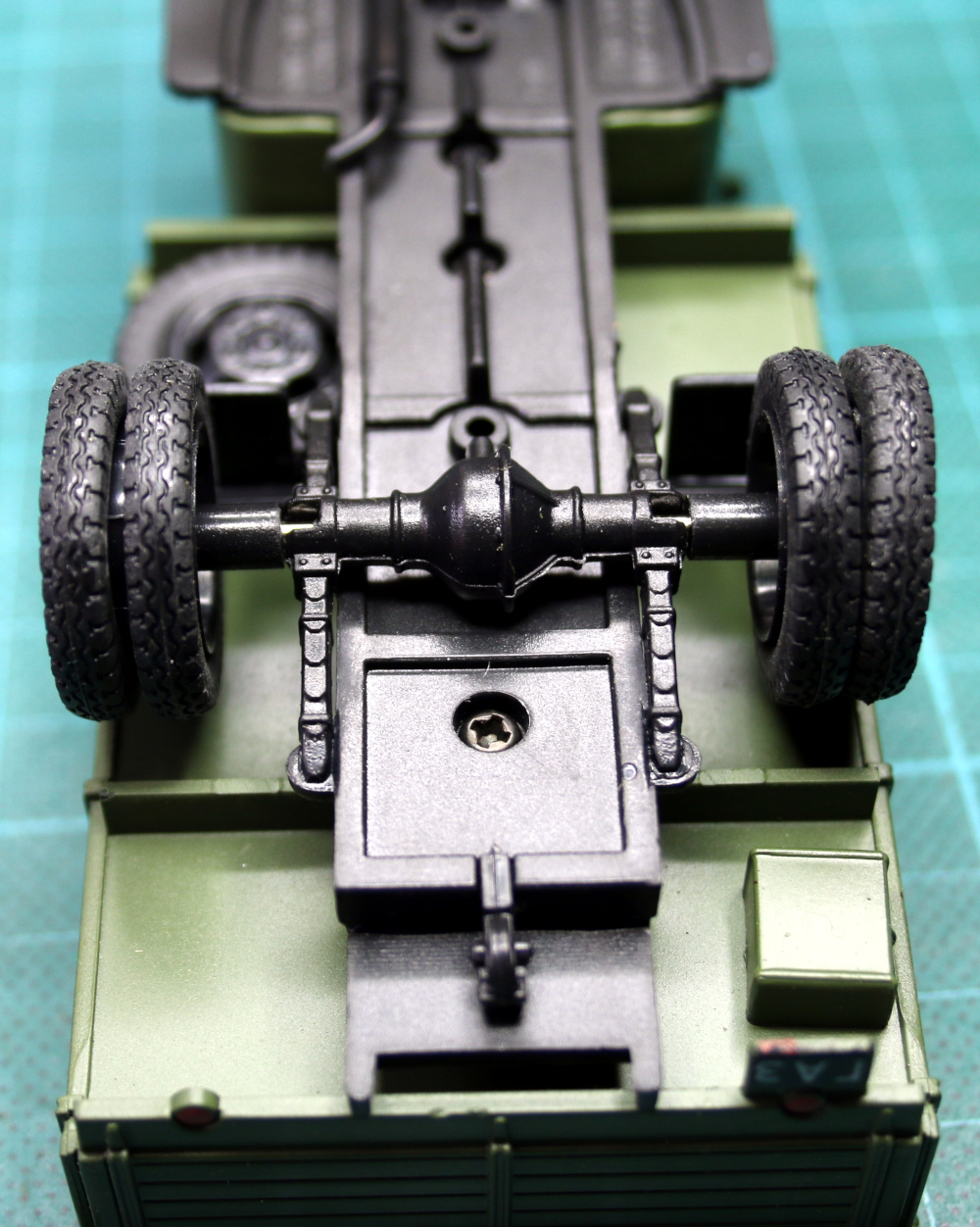
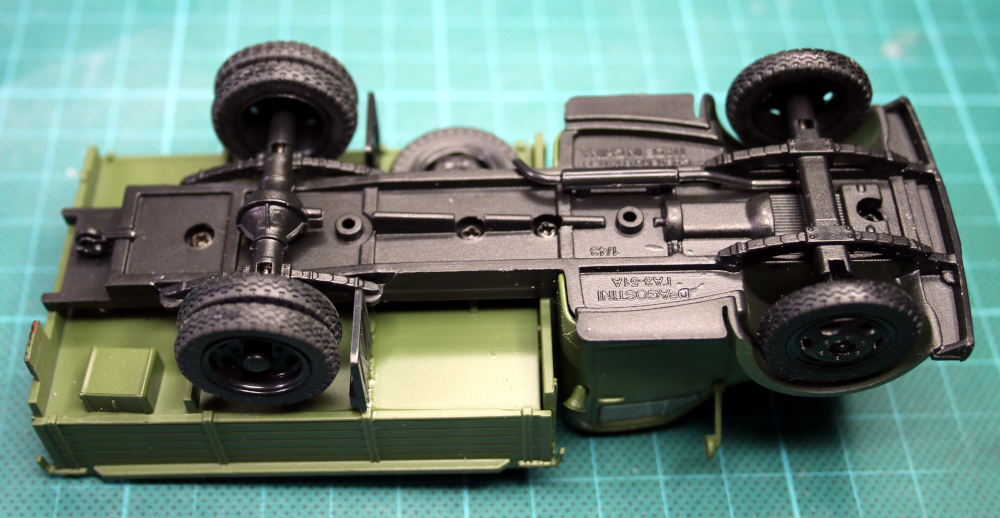
Снизу сразу бросается в глаза отсутствие кардана как такового (дан прерывистый наплыв посередине), пластиковые дубовые рессоры и закрытое внутрирамное пространство (вот это для нас даже хорошо — электронные компоненты не будут видны). Сам задний мост, в принципе, не плох — он полый внутри и, на первый взгляд, позволит разместить внутри редуктор на конических шестернях.
В общем снизу всё нужно сделать практически заново!
Таким образом, чтобы модель поехала нужно доработать переднюю подвеску так, чтобы она стала поворотной и управляемой, задний мост оснастить действующим редуктором с карданным валом, сделать работающие передние и задние рессоры, а саму модель оснастить двигателем, электроникой и аккумулятором питания. Ну и еще для освещения светодиоды, конечно…
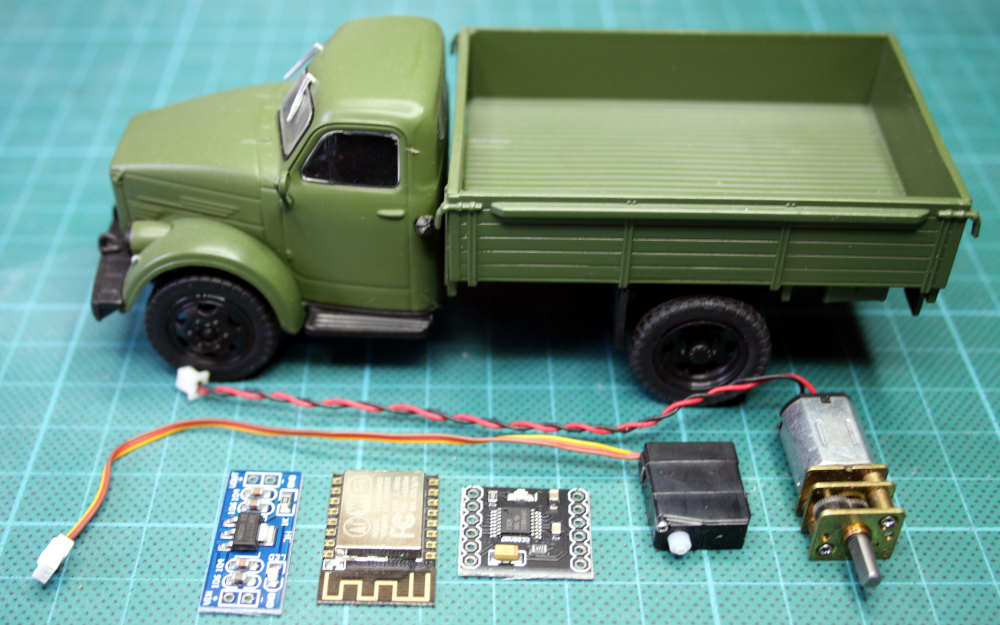
Для обеспечения подвижности и управляемости модели я буду применять двигатель и сервопривод.
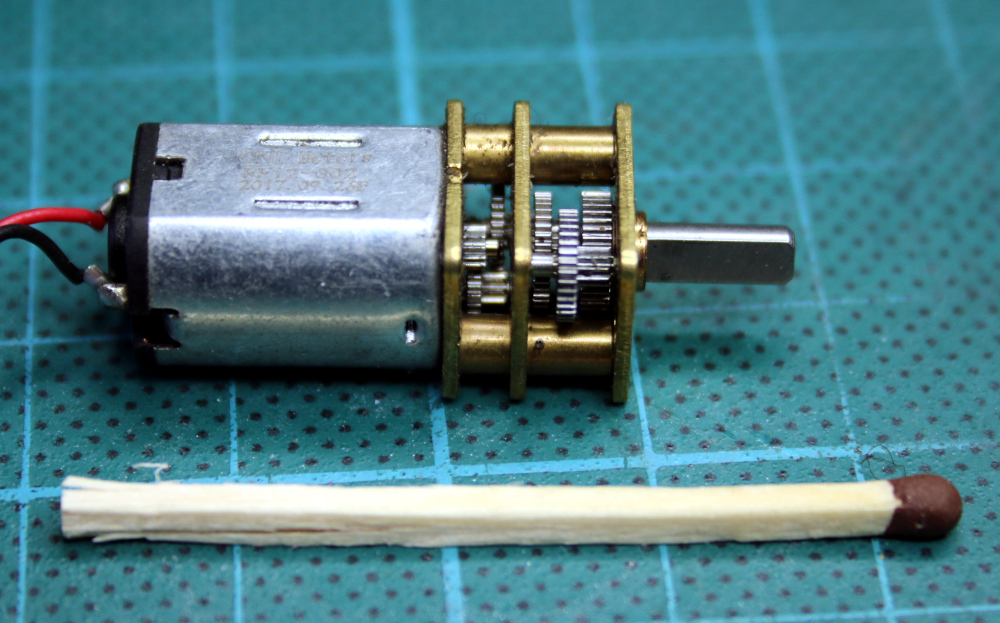
В качестве двигателя я заготовил мотор-редуктор, закупленный ранее на известном китайском ресурсе.
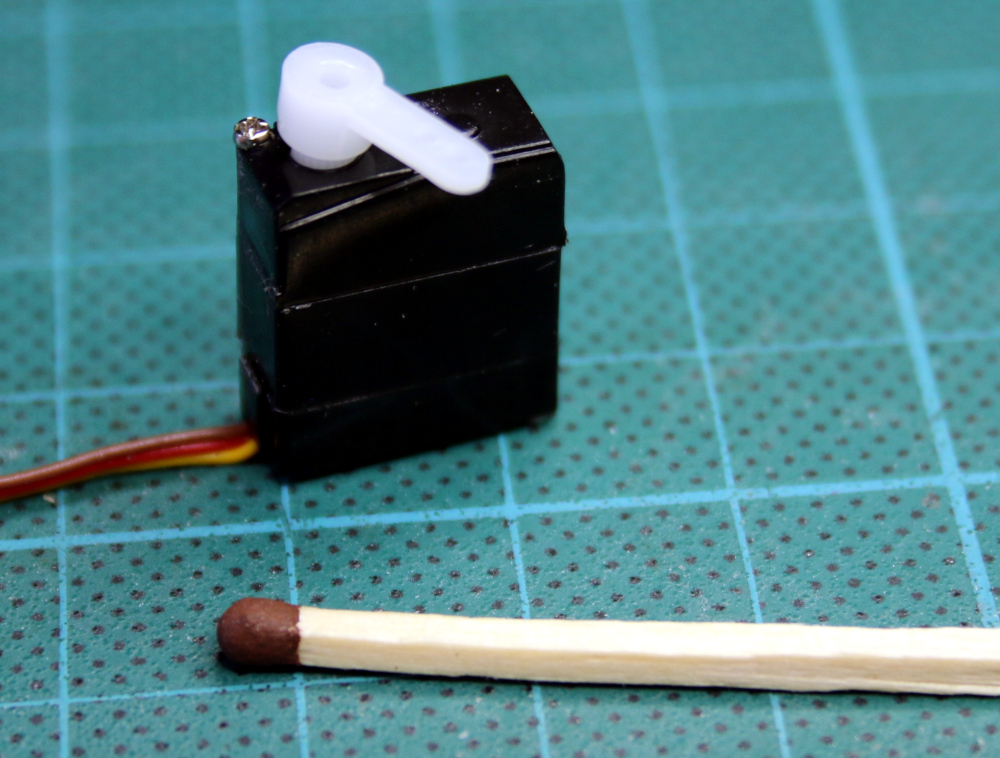
Также у меня есть самый маленький сервопривод из числа доступных на китайских торговых площадках.
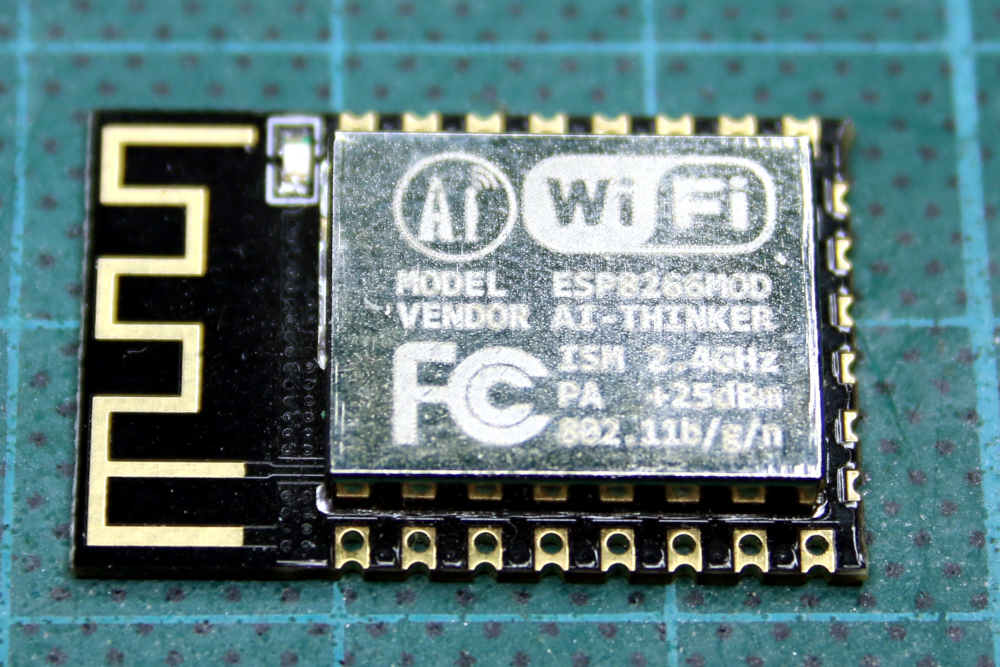
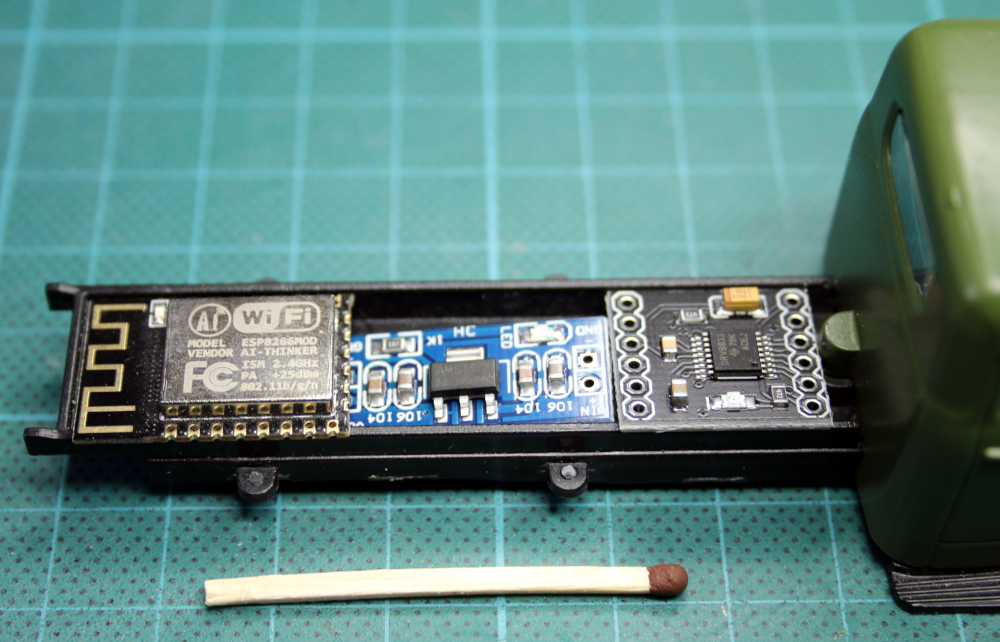
Для организации радиоканала и обеспечения управления моделью я предпочитаю использовать микроконтроллер ESP8266.
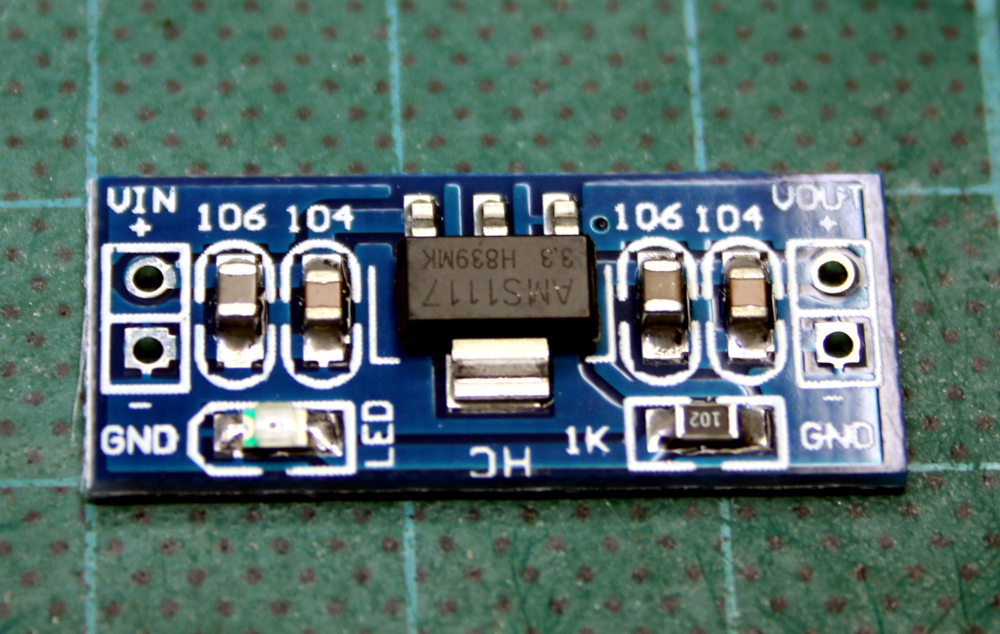
Микроконтроллер имеет напряжение питания 3,3V, а литий полимерный (LiPo) аккумулятор выдает напряжение от 4,2V до 3,7V, поэтому для обеспечения стабильного напряжения питания контроллера необходимо использовать стабилизатор напряжения на 3,3V. Такая платочка у меня есть, но возможно в дальнейшем, чтобы сэкономить место, я возьму отдельную микросхему AMS1117 и соберу всё то же самое но более компактно.
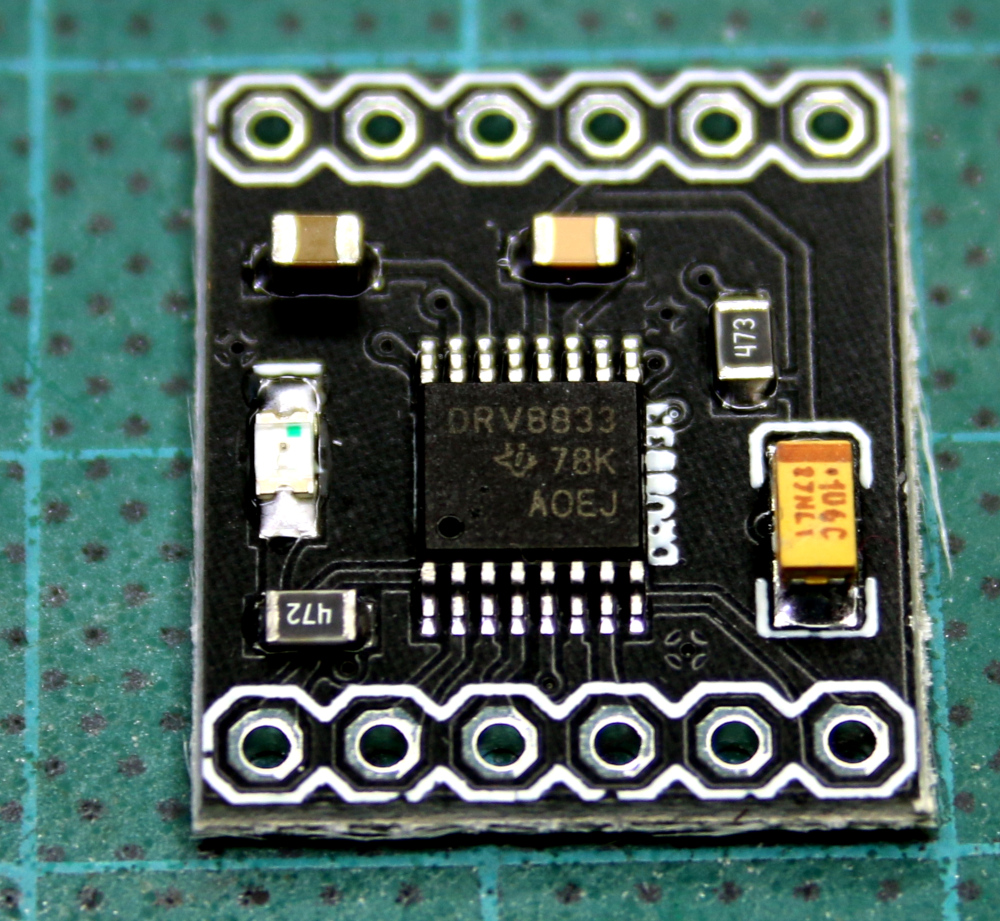
Также для обеспечения питания мотора с редуктором необходимо использовать внешний модуль драйвера двигателя так как выводы микроконтроллера ESP8266 позволяют пропускать очень незначительный ток (рекомендуемый ток отдельного пина составляет 6 миллиампер, предельный ток — 12 миллиампер) и при его превышении просто «сгорают». При этом, потребляемый двигателем ток под нагрузкой может достигать значений в 200 миллиампер!
Чтобы избежать проблем я закупил специальный драйвер двигателя на основе микросхемы серии 8833. Это двойной H-мост, позволяющий пропускать токи до 1,5А (имеется ввиду китайских ампер). Драйвер умеет управлять двумя обычными (коллекторными) двигателями или одним шаговым.
В случае с сервоприводом таких проблем нет т.к. внутри него уже встроен драйвер, обеспечивающий необходимые токи для работы. Поэтому управляющий провод сервы можно напрямую подключать к порту микроконтроллера.
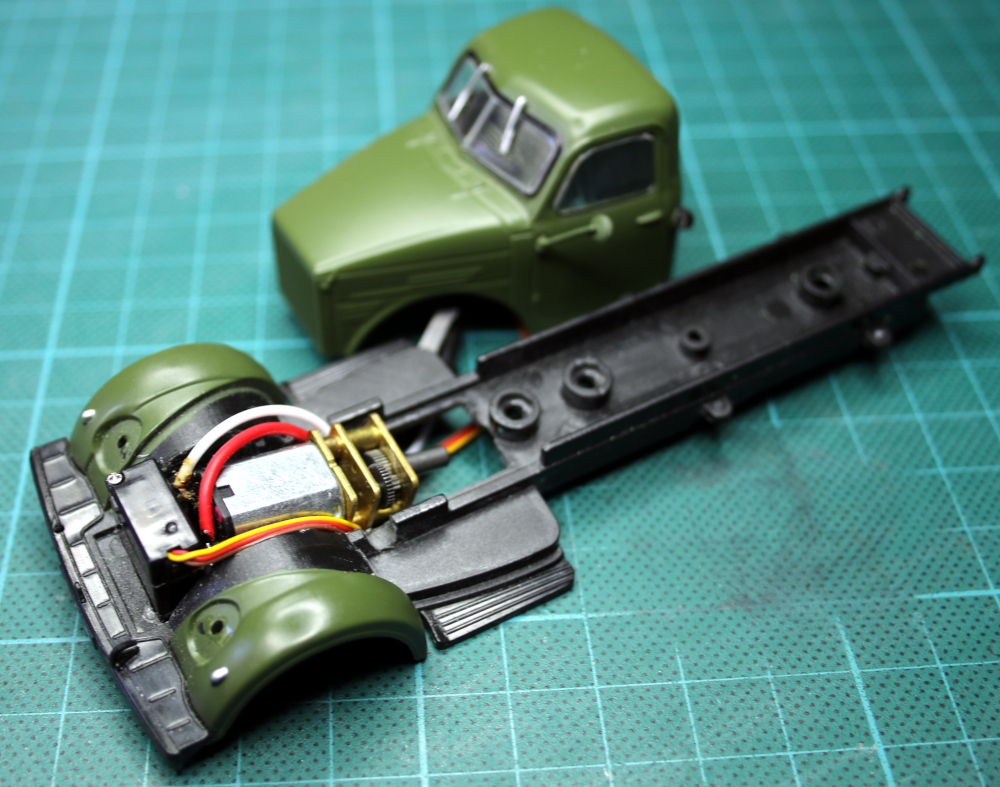
Чтобы всё это разместить в модели, приходит на ум вот такая компоновка: все электронные модули размещаются внутри свободного пространства рамы модели под кузовом, а механическая часть и аккумулятор внутри капота и под кабиной.
Для размещения двигателя и сервоприводов под кабиной необходимо удалить часть пластика в подрамном пространстве, чтобы получить компоновку как на рисунке ниже. Чуть позже я расскажу что именно и как надо резать.
Аккумулятор я пока не покупал, но планирую взять самый маленький LiPo на 100…200mAh. Такие часто используют на квадрокоптерах.
Про светодиоды в фары, фонари и указатели поворота расскажу в следующих статьях.
Ну а на сегодня — это всё. Продолжение следует…
Всем добра!